<LARS>: Light Augmented Reality System
About
✨ What is LARS?
LARS (Light-Augmented Reality System) is a <LARS> lies in its marker-free tracking engine.
🛠️ Key Features
- 🚀 High-Speed Detection: Real-time marker-free tracking engine.
- 🌈 Dynamic Projection: Seamlessly project virtual environments onto physical spaces.
- 🧩 MVC Architecture: Built on a robust Model-View-Controller pattern for modularity.
- 👶 Ease of Use: Enables researchers to bypass complex hardware setups.
- ⚡ Performance: Optimized with C++, Qt, and CUDA for high-frame-rate interaction.
- 🤖 Multi-Robot Support: Track and interact with vast numbers of agents or objects simultaneously.
🎯 Why LARS?
- Zero-Setup: No need for expensive motion capture systems or dedicated markers.
- Versatile: Works with any camera-projector setup and any number of robots.
- Open-Source: Fully available for the community to assume, adapt, and advance.
- Extensible: Modular design allows for easy integration of new sensing or display modalities.
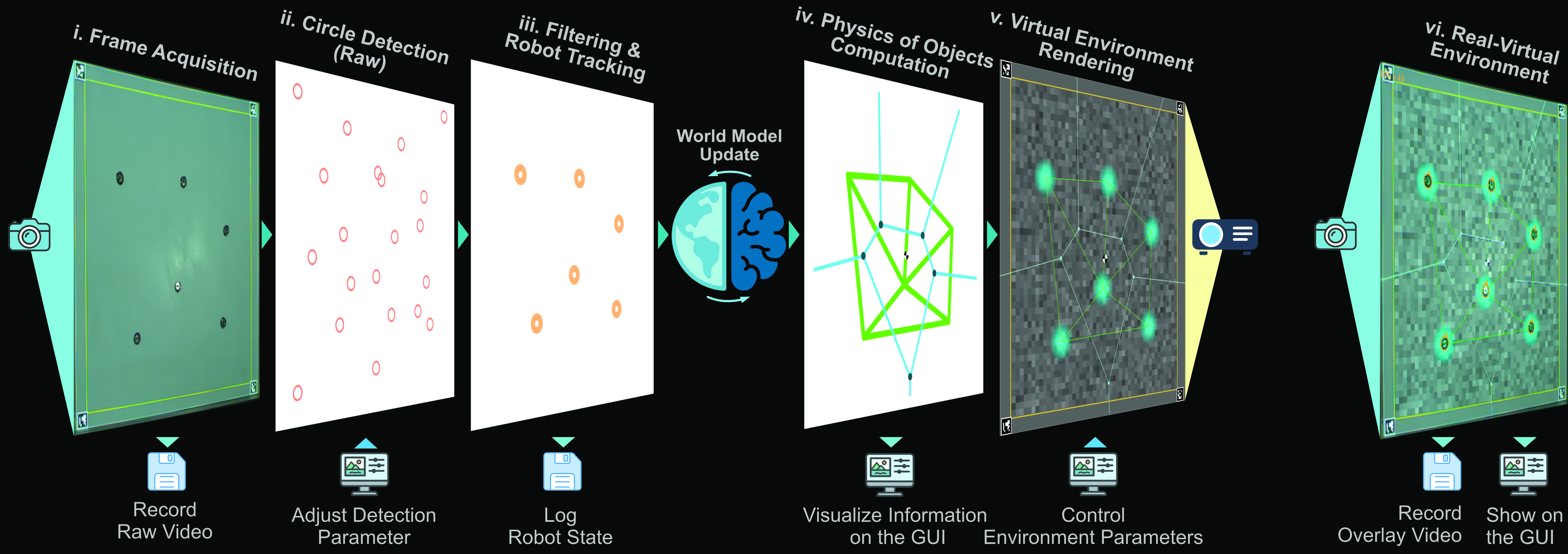
🏗️ Architecture Overview
The system is designed with modularity in mind, separating the core logic (Model), the user interface (View), and the coordination layer (Controller). This ensures that researchers can modify tracking algorithms without breaking the UI, or swap projection techniques without rewriting the core logic.
- Detection Layer: Uses OpenCV and CUDA to process video streams and identify agents.
- Tracking Layer: Maintains identity and state of agents over time.
- Projection Layer: Maps virtual content back onto the physical world based on agent positions.
🧱 Hardware Setup Overview
- 🔦 Projector: A ceiling-mounted projector, redirected by an adjustable mirror, casts visual objects onto the arena surface, creating the augmented “world” the robots see.
- 👁️ Global Sensing for Detection and Tracking: An overhead camera, attached to the frame, tracks robot positions, closing the loop between robots, visuals, and control software.
- 🖥️ GUI and Overhead Controller: A side display and a controller arm provide the human interface to LARS, for starting experiments, adjusting parameters, and monitoring the system in real time.
- 🧩 Scaffolding: An aluminum frame and enclosed base hold all components in a stable, portable structure.
🧑🔬 Example Scenarios
- 🗳️ Collective Decision-Making: Track and visualize 100+ Kilobots in a noisy, projected environment.
- ⏰ Swarm Synchronization: Record robot states and group dynamics in real time.
- 🕹️ Interactive Demos: Let visitors steer/interact with swarms and see collective behavior.
- 🧑🏫 Educational Labs: Manipulate real experiments to teach robotics, physics, and complexity.