KN2C: Robotics Team
2011-2015 / K. N. Toosi University of Technology
Robotics, Multi-Agent Systems, C++, Qt
KN2C is a Small Size League (SSL) robot soccer team: a fleet of omnidirectional mobile robots coordinated through low-latency vision processing and multi-agent strategy. The robots operate at high speed, executing precise ball handling and tactical plays in a fully dynamic, adversarial environment.
// functional summary
KN2C SSL is an end-to-end robotics framework built for the RoboCup Small Size League. My role evolved from mechanical design and prototyping into leading control systems and computer vision. The project centers on coordinating six autonomous robots in a fast-paced soccer match, fusing global vision data into real-time path planning and high-frequency motor control.
Mechanical Prototyping
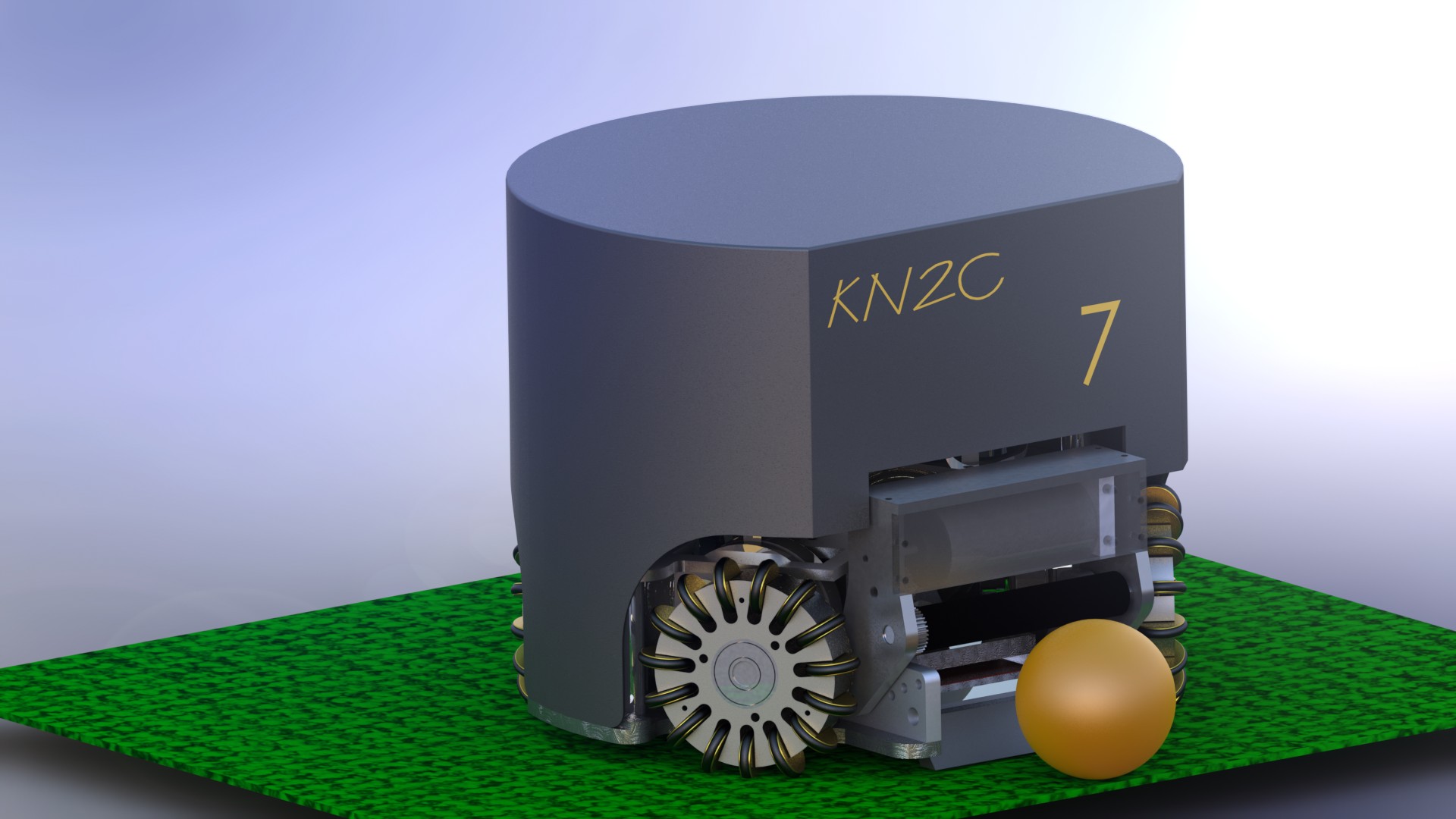
In the early stages I was responsible for the CAD design, fabrication, and maintenance of the four-wheel omnidirectional drive systems and solenoid-based kicking mechanisms.
Control & Optimization
Later I moved into trajectory optimization algorithms and motion control loops for smooth, high-speed movement under strict physical constraints.
competitive results
Under my leadership the team took 2nd place in the Machine Vision Competition (2014), then refined the vision pipeline to reach 1st place in 2015.
// project milestones
Hardware design
Designed and maintained the mechanical structure, optimizing weight distribution and solenoid efficiency for powerful kicks.
Algorithm development
Implemented Kalman filters for ball tracking and real-time trajectory planners for dynamic obstacle avoidance.
Leadership
Led a multidisciplinary team through rigorous testing phases to win national technical recognition.
// from mechanics to machine vision
Full-cycle prototyping
Taking the robots from the drawing board to the field meant hands-on assembly, electronics troubleshooting, and continuous mechanical maintenance to withstand competitive play.
Vision-guided autonomy
My final year was dedicated to the machine vision pipeline, optimizing low-latency object detection and pose estimation, which drove the jump from second place in 2014 to first place in 2015.
// technical stack & skills