<LARS>: Light Augmented Reality System
2021-2024 / Berlin, Germany, SCIoI
Augmented Reality, Human-Robot Interaction, C++, Computer Vision
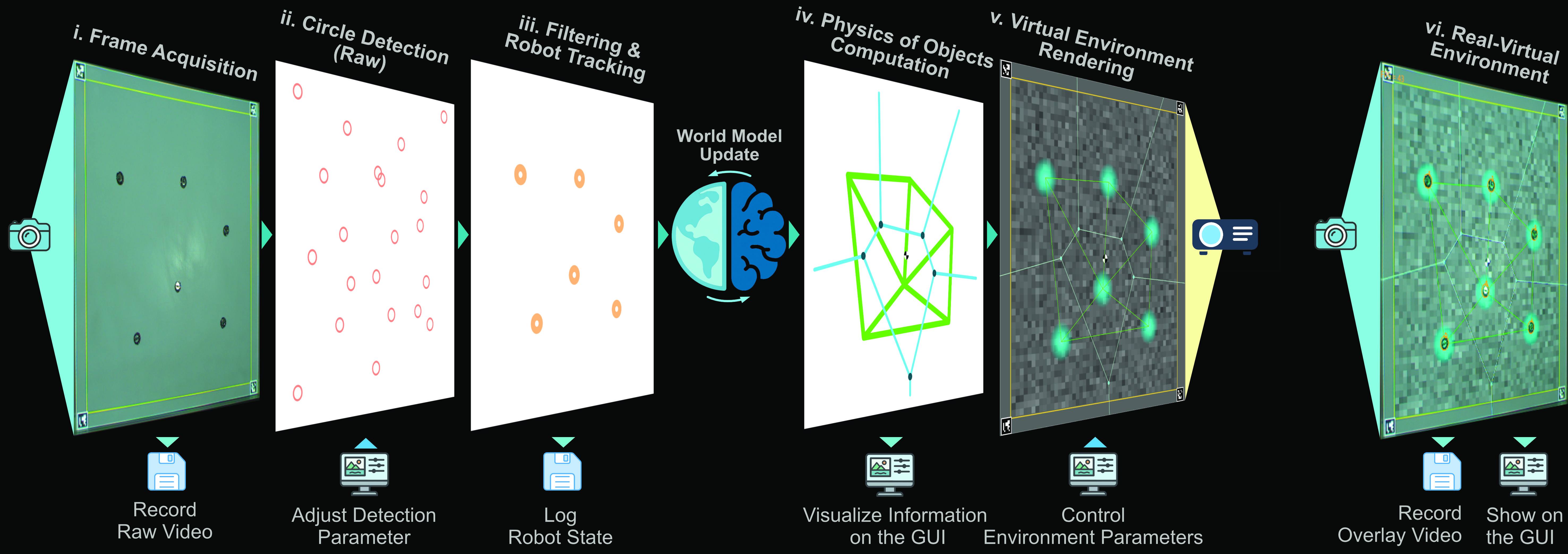
An open-source framework that links physical robot collectives to virtual environments through projected light. A single pipeline handles marker-free detection, real-time tracking, and projection, built on an MVC architecture so researchers can start experiments without assembling custom tracking hardware first.
// functional summary
LARS (Light Augmented Reality System) is a cross-platform, open-source framework that uses extended reality (XR) to merge physical and virtual worlds. It projects dynamic visual objects, gradients, trails, and fields, directly into the environment to enable stigmergy: indirect communication between robots.
Closed-loop interaction: robots reacting to virtual pheromones.
Marker-Free Tracking
Based on the ARK algorithm, LARS provides robust, real-time tracking for 100+ robots without tags or hardware modifications.
Virtual Stigmergy
Turns invisible collective dynamics into tangible experiences by projecting virtual pheromones that robots can sense and modify.
key capability
Closed-loop interaction: physical robots react to projected virtual objects, and virtual agents react to physical obstacles, bridging the reality gap.
// why lars
Reproducibility
Standardizes experimental setups by replacing physical arenas with projected, controllable virtual environments.
Education
Makes abstract collective behaviors observable and interactive for students and public engagement.
Flexibility
Supports diverse platforms (Kilobots, Thymio, e-puck) with no hardware modifications required.
// example scenarios
Collective decision-making
Visually tracking 100+ robots as they reach consensus in a noisy environment. LARS projects options and visualizes the group’s “choice” in real time.
Interactive swarm demos
Letting visitors “steer” a swarm using hand gestures or projected cues, demonstrating complex-systems concepts like self-organization and emergence.
// mvc architecture
LARS follows a classic Model-View-Controller pattern to keep the system modular and real-time (see the architecture diagram above).
// technical stack & skills